|
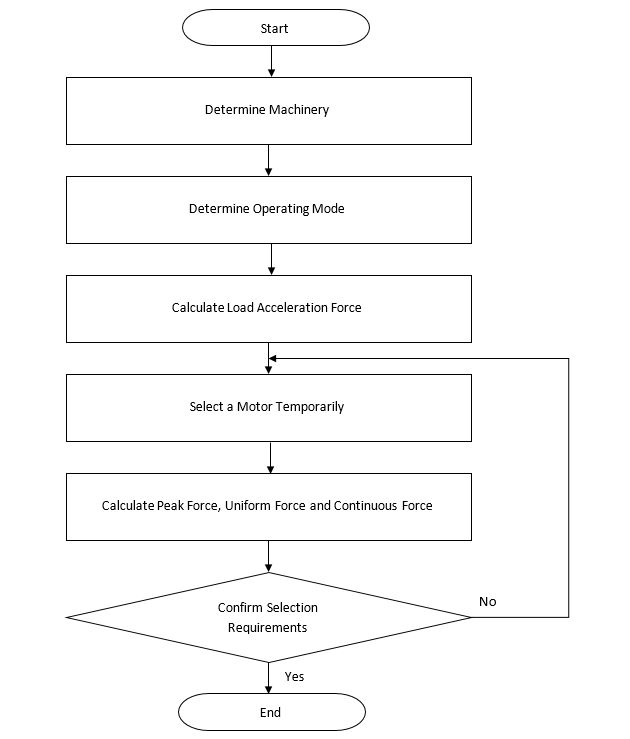
Selection Steps
- Determine system (machinery/ application).
- Determine operating mode (duty cycle, speed, acceleration/deceleration time, positioning time).
- Calculate acceleration, and load acceleration force:
$$F_a=ma$$
where
m: Load Mass (kg)
a: Acceleration (m/s2)
- Temporarily select a motor meeting the requirements of force.
- Calculate peak force:
$$F_{max}=F_1=Ma+\mu Mg+F_e$$
where
M: Total Mass (kg)
F1: Acceleration Force (N)
Fe: External Force (N)
µ: Friction Coefficient
g: Gravity Acceleration (9.8m/s2)
External force is positive when it is against the direction of operation.
- Calculate continuous force
Uniform force (N): \(F_2=\ \mu Mg+F_e\)
Deceleration force (N): \(F_3=Ma-\mu Mg+F_e\)
Continuous force (N):
$$F_{RMS} = \sqrt { \frac{1}{(t_1+t_2+\cdots+t_n)} \left (t_1 \cdot {F_1}^2 + t_2 \cdot {F_2}^2 + \cdots + t_n \cdot {F_n}^2 \right)}$$
- Confirm motor selection requirements:
The maximum force of the motor is larger than F1;
The continuous force of the motor is larger than F2 and FRMS.
- Rated power and maximum power should be calculated if required:
$$P=F \cdot v$$
|
|
|
