|
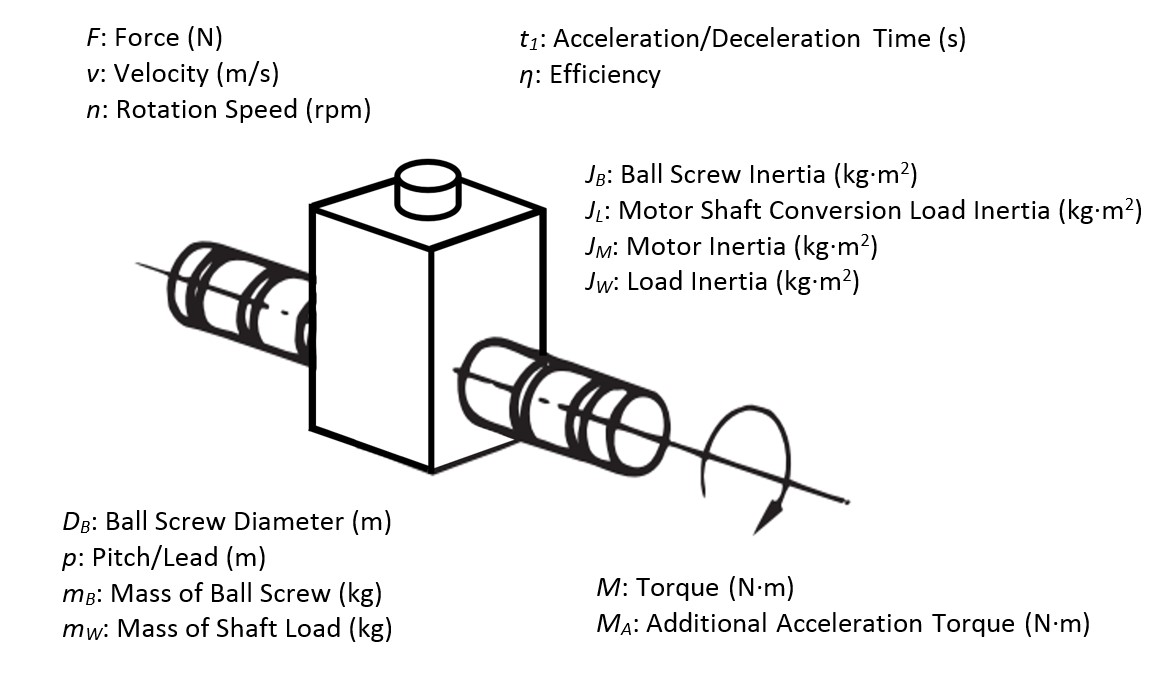
Screw
|
|
Speed of Rotation
|
$$n=\frac{60}{p}\cdot v$$
|
|
Inertia
|
$$J_B={\frac{1}{8}\cdot m}_B\cdot{D_B}^2$$
$$J_W=m_W\cdot\left(\frac{p}{2\pi}\right)^2$$
$$J_L=J_B+J_W$$
|
|
Torque
|
$$M=F\cdot\frac{p}{2\pi\eta}$$
$$M_A=\frac{2\pi n}{60t_1}\cdot\left(\frac{J_L}{\eta}+J_M\right)$$
|
|
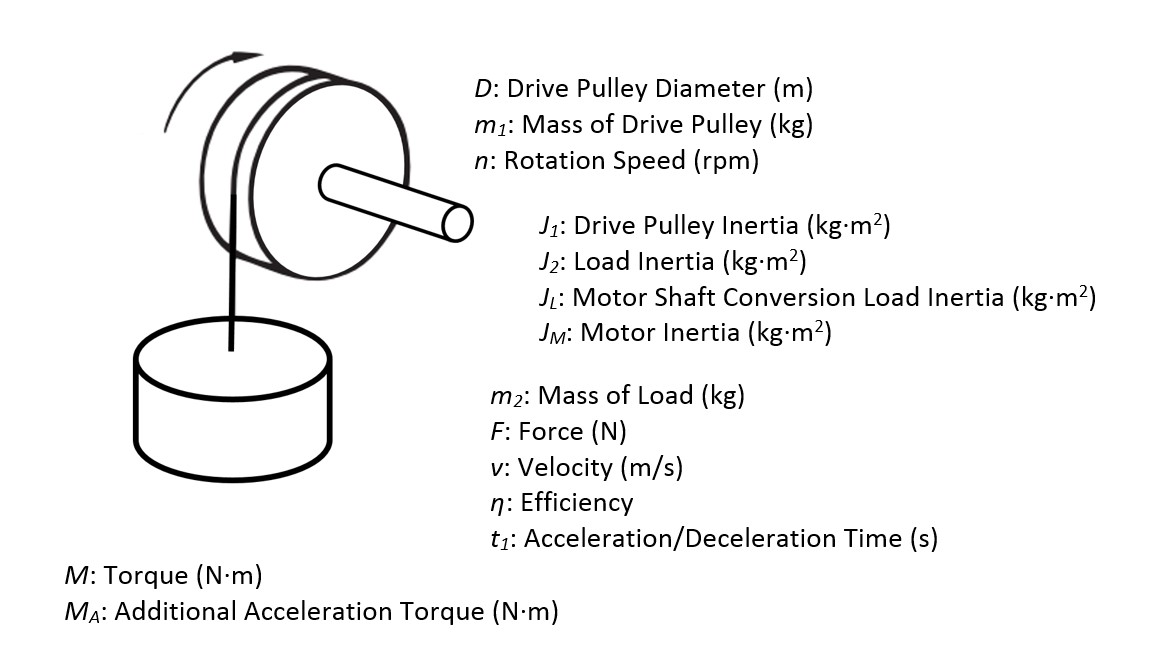
Lift
|
|
Speed of Rotation
|
$$n=\frac{60}{\pi D}\cdot v$$
|
|
Inertia
|
$$J_1=\frac{m_1D^2}{8}$$
$$J_2=\frac{m_2D^2}{4}$$
$$J_L=J_1+J_2$$
|
|
Torque
|
$$M=F\cdot\frac{D}{2\eta}$$
$$M_A=\frac{2\pi n}{60t_1}\cdot\left(\frac{J_L}{\eta}+J_M\right)$$
|
|
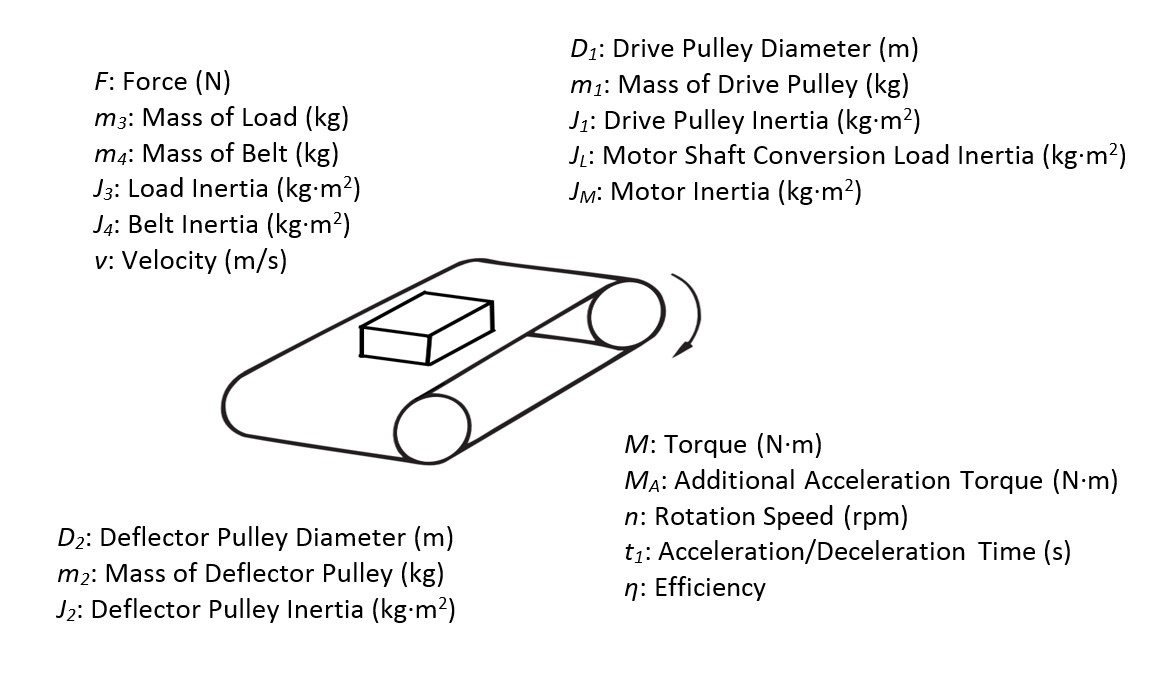
Belt
|
|
Speed of Rotation
|
$$n=\frac{60}{{\pi D}_1}\cdot v$$
|
|
Inertia
|
$$J_1=\frac{m_1{D_1}^2}{8}$$
$$J_2=\frac{m_2{D_2}^2}{8}\cdot\frac{{D_1}^2}{{D_2}^2}$$
$$J_3=\frac{m_3{D_1}^2}{4}$$
$$J_4=\frac{m_4{D_1}^2}{4}$$
$$J_L=J_1+J_2+J_3+J_4$$
|
|
Torque
|
$$M=F\cdot\frac{D_1}{2\eta}$$
$$M_A=\frac{2\pi n}{60t_1}\cdot\left(\frac{J_L}{\eta}+J_M\right)$$
|
|
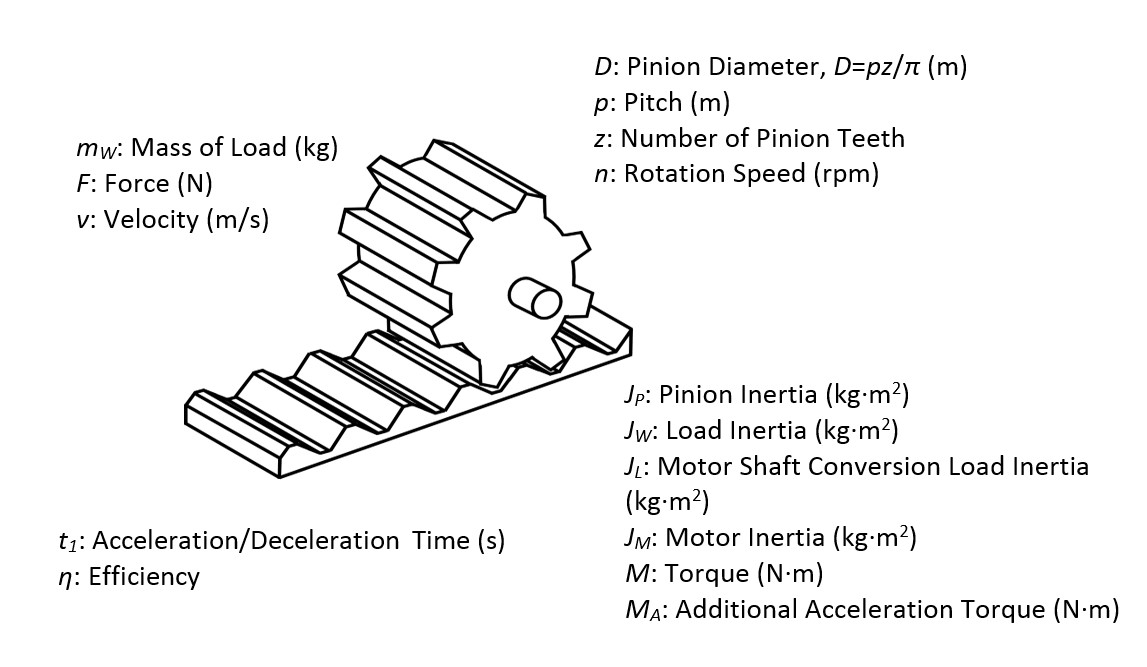
Rack and Pinion
|
|
Speed of Rotation
|
$$n=\frac{60}{pz}\cdot v$$
|
|
Inertia
|
$$J_W=m_W\cdot\left(\frac{pz}{2\pi}\right)^2$$
$$J_L=J_P+J_W$$
|
|
Torque
|
$$M=F\cdot\frac{pz}{2\pi\eta}$$
$$M_A=\frac{2\pi n}{60t_1}\cdot\left(\frac{J_L}{\eta}+J_M\right)$$
|
|
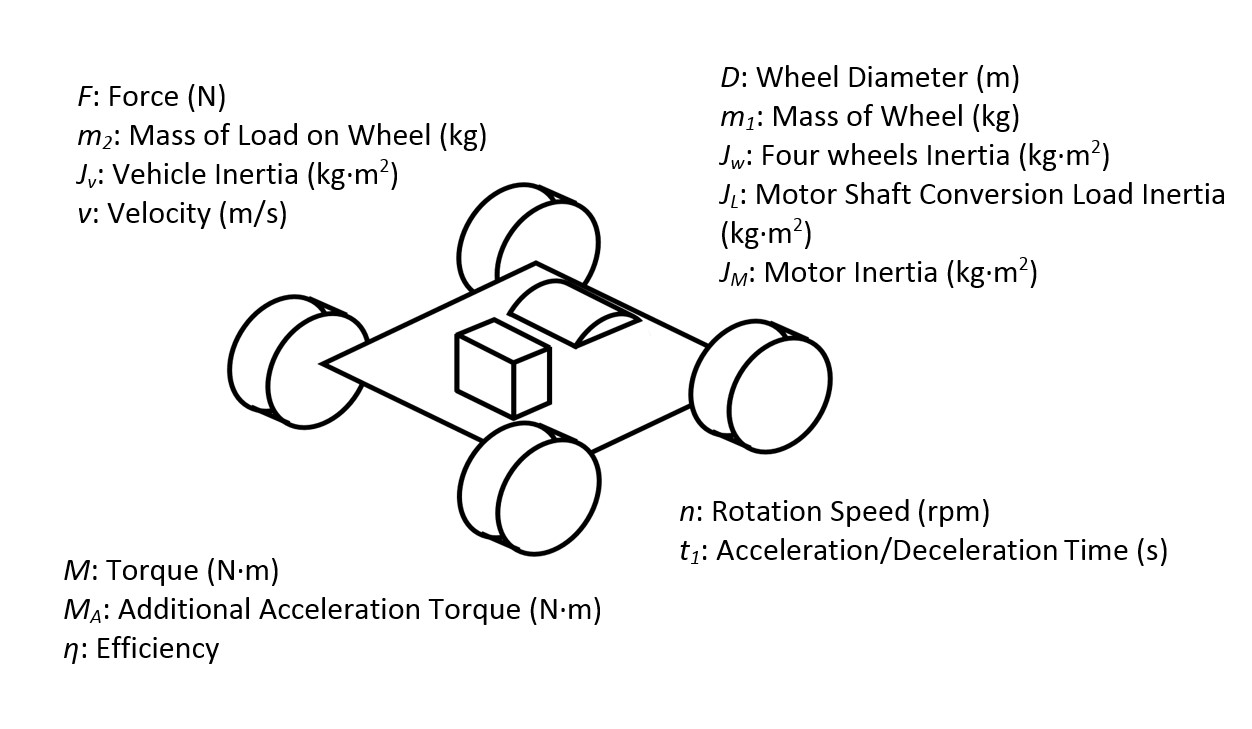
Four-Wheel Vehicle
|
|
Speed of Rotation
|
$$n=\frac{60}{\pi D}\cdot v$$
|
|
Inertia
|
$$J_W=\frac{1}{8}\cdot m_1\cdot D^2\cdot4$$
$$J_V=m_2\cdot\left(\frac{D}{2}\right)^2$$
$$J_L=J_W+J_V$$
|
|
Torque
|
$$M=F\cdot\frac{D}{2\eta}$$
$$M_A=\frac{2\pi n}{60t_1}\cdot\left(\frac{J_L}{\eta}+J_M\right)$$
|
|
Table
|
|
Speed of Rotation
|
$$n$$
|
|
Inertia
|
$$J_1=\frac{1}{8}\cdot m_1\cdot{D_1}^2$$
$$J_2=\frac{1}{8}\cdot m_2\cdot{D_2}^2$$
$$J_3=\frac{1}{8}\cdot m_3\cdot{D_3}^2+m_3\cdot r^2$$
$$J_L=J_1+J_2+J_3$$
|
|
Torque
|
$$M=F\cdot\frac{d}{\eta}$$
$$M_A=\frac{2\pi n}{60t_1}\cdot\left(\frac{J_L}{\eta}+J_M\right)$$
|